 В данной статье мы подробно рассмотрим возможности ПИД регулирования частотных преобразователей M-DRIVER, а также где применяется данное регулирование и какие способы управления заложены в преобразователях M-Driver. Прежде всего частотный преобразователь это многофункциональное устройство способное производить регулирование скорости двигателя по разным технологическим параметрам (давление, перепад, расход и т.п.). Частотные преобразователи M-Driver имеют аналоговые входа к которым соответственно и подключаются датчики измерения параметров. Аналоговый вход AI1 поддерживает только вход с унифицированным сигналом 0-10В, а вход AI2 может иметь сигнал 0-10В или 0/4-20мА (заводское значение).
В данной статье мы подробно рассмотрим возможности ПИД регулирования частотных преобразователей M-DRIVER, а также где применяется данное регулирование и какие способы управления заложены в преобразователях M-Driver. Прежде всего частотный преобразователь это многофункциональное устройство способное производить регулирование скорости двигателя по разным технологическим параметрам (давление, перепад, расход и т.п.). Частотные преобразователи M-Driver имеют аналоговые входа к которым соответственно и подключаются датчики измерения параметров. Аналоговый вход AI1 поддерживает только вход с унифицированным сигналом 0-10В, а вход AI2 может иметь сигнал 0-10В или 0/4-20мА (заводское значение).
Рассмотрим одну из стандартных задач частотного преобразователя - поддержание заданного давления воды в трубопроводе многоэтажного дома. Давление в трубопроводах постоянно меняется в зависимости от потребности воды в разные промежутки времени. Так например, в утреннее время потребление воды высокое, а в ночное минимальное. В обычном случае (без частотного преобразователя) двигатель работает постоянно, а регулирование давление производится автоматическими или ручными клапанами (задвижками). Частотный преобразователь решает сразу несколько задач:
- уменьшает потребление электроэнергии, т.к. двигатель работает не на полную мощность или вообще отключается
- поддержание точного заданного давления с помощью ПИД регулирования
- защита двигателя от перегрузок, потери фазы и т.п.
- плавный пуск и останов двигателя (защита от пусковых токов и гидроударов)
- автоматическое управление не требующее оператора
Настройка ПИД регулирования на частотных преобразователях M-Driver происходит в несколько этапов:
1) В первую очередь необходимо задать параметры двигателя в частотный преобразователь. Для этого в параметрах P1-00 - P1-05 необходимо ввести данные с шильдика двигателя.
2) Следующим этапом выбираем скалярный закон управления P0-01=2.
3) В параметре P0-03=8 - задание от ПИД регулятора.
4) Выбираем управление частотным преобразователем в параметре P0-02=1 - с клемм дискретных входов. При этом необходимо конфигурировать параметры P4-00 - P4-04 при необходимости. Самым простым решением будет P4-00 = 1 - команда ПУСК при поступлении сигнала на DI1. Возможно также производить настройку по шине данных Modbus. В этом случае нужно в параметре P0-02 выбрать значение 2.
5) Для более эффективной работы частотного преобразователя рекомендуем настроить следующие параметры:
P0-17 = 3-4 сек (время разгона двигателя)
P0-18 = 3-4 сек (время останова двигателя)
P6-10 = 1 (остановка двигателя по инерции, естественным способом)
P0-14 = 20Гц (ограничение нижнего предела частоты, для предотвращения работы двигателя на низких частотах)
PA-08 = 0 (данный параметр необходимо изменять на значение 0, если Вы используете режим "сна" и Вам необходимо чтобы при "просыпании" стартовая частота двигателя была равна P0-14)
Настройка ПИД регулятора в частотном преобразователе M-Driver реализована максимально просто и эффективно. Для правильной работы ПИД регулятора на частотном преобразователе необходима обратная связь, по которой будет происходить сравнение значений с уставкой ПИД регулятора. В качестве обратной связи мы будем использовать датчик давления с унифицированным сигналом 4-20мА и подключать его к аналоговому входу частотного преобразователя AI2. Мы рекомендуем выбирать именно датчики с токовым сигналом (0/4-20мА), так как они менее подвержены наводкам и потерям на дальние расстояния, чем датчики с унифицированным сигналом 0-10В.
1) В параметре PA-00 выбираем задание уставки ПИД. Если PA-00 = 0, то происходит задание через параметр PA-01. В параметре PA-01 задается значение от 0 до 100% от диапазона датчика. Если аналоговый датчик давления 4-20мА имеет диапазон от 0 до 10 бар, то соответственно заданная уставка в параметре PA-01 = 40% будет соответствовать 4 бар. Также в параметре PA-00 могут быть выбраны другие значения, например "Задание по шине данных Modbus RTU, значение 5". В этом случае задание для ПИД будет выбираться не в параметре PA-01, а задаваться по протоколу Modbus RTU от других устройств (контроллер, панель HMI, SCADA и т.п.).
2) В параметре PA-02 = 1, выбираем обратную связь ПИД по аналоговому входу AI2, к которому и подключен наш аналоговый датчик давления 4-20мА.
3) Следующим пунктом настраиваем параметр PA-03 = 0 (направление ПИД вперед). Когда обратная связь ПИД (показания с датчика) меньше задания ПИД, то частотный преобразователь увеличивает частоту. Соответственно, если выбрать PA-03 = 1 (обратное направление ПИД), то процесс регулирования частоты будет обратный. Когда обратная связь ПИД меньше задания ПИД, то частотный преобразователь будет уменьшать частоту.
4) Если аналоговый датчик давления используется с унифицированным входом 4-20мА, то его необходимо откалибровать, так как вход AI2 на частотном преобразователе рассчитан на сигнал 0-20мА.
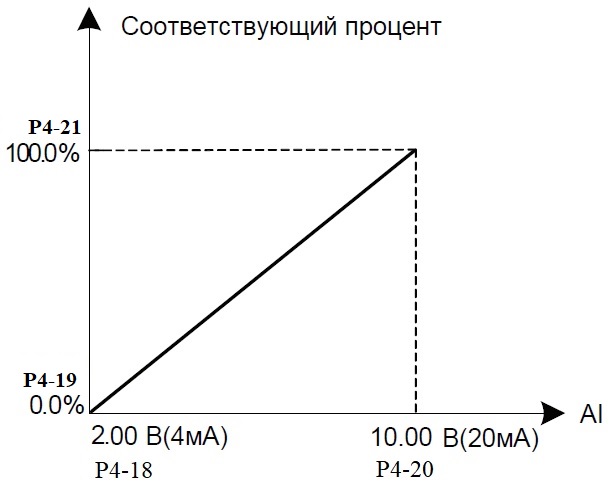 P4-18 = 2 (минимальное значение кривой AI2)
P4-18 = 2 (минимальное значение кривой AI2)
P4-19 = 0 (процент минимального значения кривой AI2)
P4-20 = 10 (максимальное значение кривой AI2)
P4-21 = 100 (процент максимального значения кривой AI2)
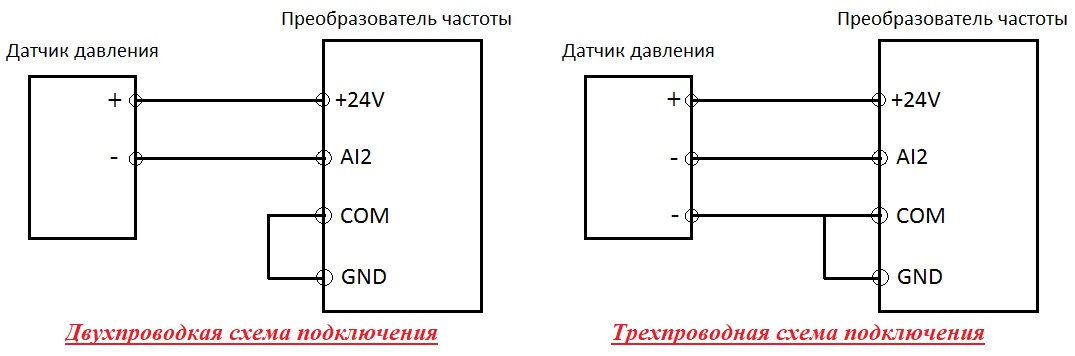
Таким образом будет производиться смещение начальной точки аналогово входа AI2 c 0мА на 4мА. Если Вам необходимо использовать датчик с унифицированным входом 0-10В, то Вы можете его подключить к обоим аналоговым входам AI1 и AI2. Так как с завода AI2 сконфигурирован на унифицированный сигнал 0-20мА, то поменять его можно с помощью джампера JP2 (1-2 положение 0-10В, 2-3 положение 0-20мА). Частотные преобразователи M-Driver имеют встроенный блок питания на 24В DC, к которому возможно производить подключение данных датчиков. Аналоговые датчики давления имеют как правило двух или трехпроводную схему подключения. Подключение датчика по двухпроводной схеме к аналоговому входу AI2 происходит следующим образом: + датчика давления подключается к +24В частотного преобразователя, - датчика давления к аналоговому входу AI2, а между контактами GND и COM делается перемычка.
 Частотные преобразователи M-Driver при правильной конфигурации могут обеспечивать до 30% экономии электроэнергии. Для поддержания определенного давления порой достаточно поддерживать минимальную скорость двигателя, либо производить его отключения на небольшие промежутки времени, тем самым позволяя значительно экономить электроэнергию. В частотных преобразователях M-Driver реализована функция "сна", которая позволяет отключать частотный преобразователь на низких частотах, обеспечивая экономию электроэнергии и снижение нагрузки с обмоток двигателя (на низких частотах) и частотного преобразователя. При понижении давления в системе ниже заданного уровня частотный преобразователь выходит из режима "сна" и продолжает работу. Для настройки режима "сна" на частотном преобразователе необходимо запараметрировать следующие параметры:
Частотные преобразователи M-Driver при правильной конфигурации могут обеспечивать до 30% экономии электроэнергии. Для поддержания определенного давления порой достаточно поддерживать минимальную скорость двигателя, либо производить его отключения на небольшие промежутки времени, тем самым позволяя значительно экономить электроэнергию. В частотных преобразователях M-Driver реализована функция "сна", которая позволяет отключать частотный преобразователь на низких частотах, обеспечивая экономию электроэнергии и снижение нагрузки с обмоток двигателя (на низких частотах) и частотного преобразователя. При понижении давления в системе ниже заданного уровня частотный преобразователь выходит из режима "сна" и продолжает работу. Для настройки режима "сна" на частотном преобразователе необходимо запараметрировать следующие параметры:
P8-49 = 22Гц (частота пробуждения)
P8-50 = 5сек (задержка пробуждения)
P8-51 = 21Гц (частота засыпания)
P8-52 = 5сек (задержка засыпания)
PA-28 =1 (постоянная работа ПИД, даже после отключения двигателя)
Применение частотных преобразователей становится необходимостью в современное время и стремительное развитие технологий. Частотные преобразователи M-Driver могут быть внедрены в различные по сложности системы автоматизации с каскадным пуском насосов, чередованием работы двигателей по наработке, удаленным управлением и мониторингом.
Если у Вас остались вопросы по параметрированию частотного преобразователя M-Driver, Вы всегда можете обратиться за технической консультацией по почте info@analite.ru.
ПОЛЕЗНЫЕ ССЫЛКИ:
Руководство пользователя частотных преобразователей M-Driver (RUS)
Частотные преобразователи M-Driver с входным напряжением 380В
Частотные преобразователи M-Driver с входным напряжением 220В